
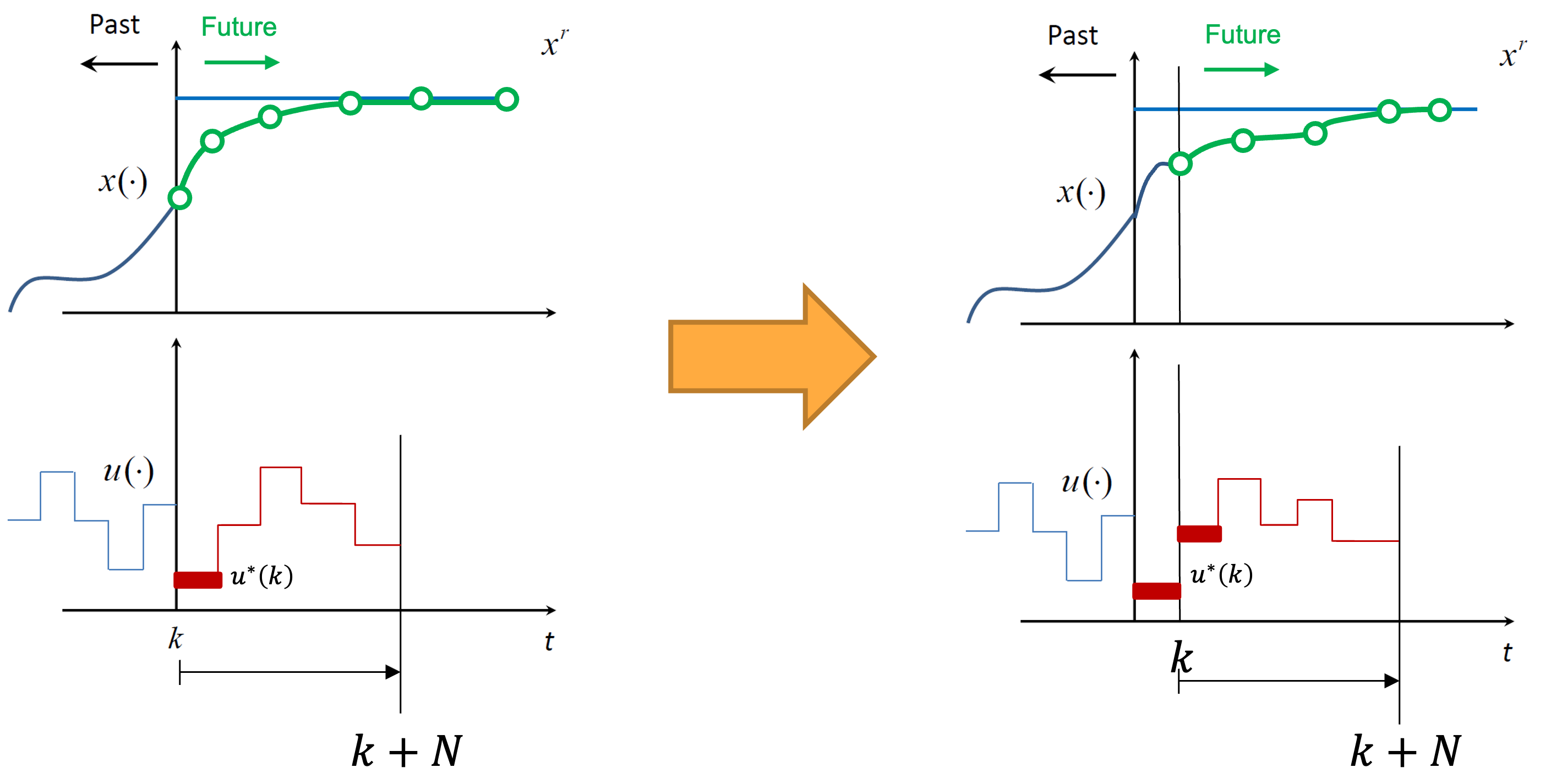
Model predictive control (MPC) is an optimization-based control method that uses a model to predict the system behavior through a given time horizon. At each time step, the control sequence that minimizes a cost function based on the system evolution is computed subject to a set of constraints. Only the first control signal of the obtained sequence is applied, and the rest is discarded. In the next instant, the time window of the problem is displaced one step ahead following a receding horizon strategy, and the same procedure is repeated.
Compared with other methods, MPC presents major advantages, such as the ability to deal explicitly with delays and dead times. It also handles the multi-variable, non-minimum phase, and unstable systems. Its properties have been widely investigated in the last two decades and currently the MPC is a control technique capable to provide stability, robustness, constraint satisfaction and tractable computation for linear and for nonlinear systems. For all these reasons, MPC is a widely applied method in the process industry. In recent years MPC has seen a rapid expansion in several other field, such as in biomedical applications, automotive and aerospace industries, smart energy grids, and finance.
My suggestions for a must-have bibliography on MPC:
-
J. B. Rawlings, D. Q. Mayne, M. Diehl. Model Predictive Control: Theory, Computation and Design. Nob-Hill Publishing, 2nd ed., 2020.
- E. F. Camacho and C. Bordons, Model Predictive Control. Springer-Verlag, 2nd ed., 2004.
- J. M. Maciejowski. Predictive control: with constraints. Pearson education, 2002.
- F. Borrelli, A. Bemporad, and M. Morari, Predictive control for linear and hybrid systems, Cambridge University Press, 2017.
- B. Kouvaritakis, M. Cannon. Model Predictive Control: classic, robust, stochastic. Springer. 2016.
- S. Rakovic, W. Levine. Handbook of Model Predictive Control. Birkhauser. 2019.